

Cách chế tạo Robot - Thiết kế PCB
Phần hai của loạt bài viết về chế tạo robot có thể đi theo đường thẳng hoặc tường và tránh chướng ngại vật! Lần này chúng tôi sẽ đề cập đến thiết kế PCB.










Bắt đầu xây dựng một robot có thể đi theo đường hoặc tường và tránh chướng ngại vật!
Tổng quat
Đây là phần 2 của loạt bài viết về kinh nghiệm của tôi khi chế tạo một robot có thể làm nhiều việc khác nhau. Mời các bạn xem phần 1 tại đây . Tôi nghĩ sẽ thật gọn gàng nếu tạo ra một con robot dễ dàng lắp ráp lại với nhau bằng một chiếc mỏ hàn duy nhất và giá cả cũng phải chăng. Tôi đã đưa ra các yêu cầu sau cho rô bốt của mình:
- Nhiều bộ dụng cụ đắt tiền, vì vậy nó phải tương đối rẻ.
- Nó phải dễ dàng ghép lại với nhau mà không cần thiết bị đặc biệt.
- Nó phải được lập trình dễ dàng mà không cần IDE hoặc lập trình viên phức tạp.
- Nó phải đủ mạnh để có thể mở rộng.
- Nó sẽ chạy khỏi một nguồn điện đơn giản.
- Nó phải có thể đi theo một đường hoặc một bức tường và tránh chướng ngại vật.
Trong bài viết này, tôi sẽ nói về cách tôi chuyển đổi thiết kế và sơ đồ thành một bảng mạch in có thể đặt hàng trực tuyến!
Chọn nhà hội đồng
Ngày nay, có rất nhiều nhà hội đồng quản trị nên thực sự rất khó để chọn một nhà. Tôi đã đi với chi phí thấp nhất mà tôi có thể tìm thấy vì mục tiêu của tôi là một robot giá cả phải chăng và tôi không có bất kỳ yêu cầu phức tạp nào về bo mạch. Tôi tìm thấy một trang web có tên Elecrow cung cấp một thỏa thuận về 10 PCB chỉ với 14 đô la! Điều đó thật tuyệt vời. Việc vận chuyển tăng gấp đôi chi phí nếu bạn muốn nó được vận chuyển trong một khoảng thời gian hợp lý, nhưng vẫn không quá tệ nếu nó đến từ Trung Quốc. Bất cứ khi nào bạn tìm thấy một ngôi nhà hội đồng quản trị, bạn sẽ muốn đảm bảo xem thông số kỹ thuật của họ cho bảng. Một số điều chính cần tìm là:
- Chúng hỗ trợ bao nhiêu lớp?
- Họ có cung cấp màn hình lụa miễn phí cho cả hai lớp không?
- Kích thước tối thiểu là bao nhiêu?
- Phạm vi lỗ khoan là gì?
- Độ dày và khoảng cách vết tối thiểu là gì? Đặc điểm kỹ thuật này là một trong những đặc điểm quan trọng đối với bảng nhỏ / dày vì nếu nhà hội đồng không thể xử lý các dấu vết gần thì sẽ rất khó định tuyến bảng.
- Sẽ dễ dàng hơn nếu ban giám đốc có tệp DRC (kiểm tra quy tắc thiết kế) mà bạn có thể tải vào chương trình bố trí của mình để đảm bảo bạn tuân thủ các thông số kỹ thuật của chúng. May mắn thay, Elecrow đã tạo một trong những tệp này cho bảng 2 lớp.
Đặt các thành phần
Điều quan trọng là dành nhiều thời gian cho việc bố trí linh kiện để đáp ứng các yêu cầu cơ học và nhóm các mạch lại với nhau. Bo mạch này có rất nhiều bo mạch rời gắn với nhau nên việc nhóm các mạch không quá quan trọng. Vấn đề lớn về mặt cơ học là lắp mọi thứ vào kích thước bảng được Eagle cho phép. Phiên bản phần mềm miễn phí của Eagle chỉ cho phép bảng có kích thước 100 x 80mm. Điều này có hiệu quả vì nhà hội đồng có một đặc biệt trên bảng có kích thước 10x10cm trở xuống. Tuy nhiên, nó gây khó khăn cho việc lắp các vật dụng lớn như pin và động cơ. Tôi đã tạo các gói cho tất cả các thành phần và đặt chúng bên dưới. Vấn đề duy nhất mà tôi gặp phải là hai trong số các vít của bánh xe lăn cản trở nhựa giữ pin, vì vậy giá đỡ pin sẽ bị đẩy lên vì nó nằm trên các vít, hoặc tôi có thể bỏ qua hai vít và dựa vào hai vít phía trước. Cảm biến dòng thực sự sẽ được kết nối với một loạt các tiêu đề vì nó phải rất gần với sàn nhà. Vì tôi không có chỗ bên dưới bảng, nên nó sẽ phải được hàn vào phía trên bằng đầu nối góc vuông và đi ra khỏi mặt trước của robot.
Nets khóa định tuyến
Bộ định tuyến tự động không thực hiện tốt công việc định tuyến theo dõi nguồn điện. Tôi đã định tuyến các kết nối quan trọng theo cách thủ công bên dưới, chẳng hạn như nguồn, động cơ và điều khiển động cơ. Chiều rộng vết cho nguồn phải càng lớn càng tốt để hạn chế sụt áp. Nếu có thể, tốt nhất nên định tuyến tất cả các dấu vết theo cách thủ công để bạn biết điều gì đang xảy ra với các tín hiệu. Đối với các tín hiệu như kết nối kỹ thuật số tốc độ thấp và các mạng không quan trọng khác, bộ định tuyến tự động có thể là một công cụ tiết kiệm thời gian tuyệt vời. Tôi không định tuyến mặt bằng vì tôi định sử dụng sơ đồ mặt bằng e để kết nối các mặt bằng với nhau. Các đường màu vàng được hiển thị bên dưới được gọi là các đường "tốt nhất" và chúng cho thấy các kết nối nào vẫn chưa được thực hiện. Chúng hữu ích cho việc định tuyến thủ công để xem mạng sẽ đi đến đâu.
Tự động định tuyến phần còn lại
Tôi đã thiết lập bộ định tuyến tự động để sử dụng khoảng cách và chiều rộng theo dõi được chỉ định bởi hội đồng quản trị, thực tế chỉ là cài đặt mặc định. Tôi cũng yêu cầu bộ định tuyến sử dụng nỗ lực cao và tất cả khả năng xử lý máy tính của tôi. Bo mạch nhỏ này không đánh thuế bộ định tuyến tự động quá nhiều, nhưng một bo mạch lớn hơn có thể mất một lúc. Trước khi chạy bộ định tuyến tự động, hãy nhớ lưu một bản sao của tệp PCB của bạn trong trường hợp bộ định tuyến tự động không hoạt động theo cách bạn muốn.
Đây là kết quả của bộ định tuyến tự động:
Dọn dẹp và Đổ đất
Điều quan trọng là phải chạy kiểm tra DRC vì bộ định tuyến tự động có thể mắc lỗi và để lại dấu vết nhỏ xung quanh mà không nên ở đó. Có một lỗi chồng chéo do DRC mắc phải mà bộ định tuyến tự động tạo bởi chân cảm biến dòng 5:
Tôi cũng đã loại bỏ tất cả các dấu vết mặt đất vì tôi định sử dụng đổ đất. Để sử dụng đổ đất, hãy vẽ một đa giác xung quanh bảng trên các đường kích thước của bảng. Sau đó, sử dụng lệnh "name" để đặt mạng thành "GND." Tôi thiết lập mặt phẳng mặt đất để cách xa mọi dấu vết khác 50 mils bằng cách sử dụng tùy chọn Spacing trong cài đặt đa giác. Điều này làm giảm khả năng một dấu vết có thể bị rút ngắn xuống đất nếu ban quản trị mắc sai lầm.
Thuộc tính mặt đất
Máy bay mặt đất, không khâu
Chiếc máy bay mặt đất cần phải được khâu lại với nhau sử dụng VIAS mặt đất. Điều này giảm thiểu sự ghép nối điện dung giữa các lớp có thể gây ra sự cố với mạch tương tự và RF. Quan trọng hơn đối với robot này là nó làm giảm các vòng lặp và độ dài mà dòng điện trở lại cần thực hiện để làm cho nó trở lại pin. Nó cũng cho phép các khu vực mà máy bay không thể tiếp cận do các dấu vết tín hiệu được lấp đầy.
Máy bay mặt đất - Đã khâu
Kiểm tra DRC và ERC cuối cùng
Chạy bộ kiểm tra DRC và ERC lần cuối để đảm bảo không có bất kỳ vấn đề nào về hội đồng quản trị sẽ được phát hiện bởi hội đồng quản trị. Bạn cũng nên kiểm tra kỹ các kết nối và hướng chính, đặc biệt là các kết nối ngoài bo mạch. Nó thực sự phổ biến để làm cho chúng trở lại.
Tạo Gerbers
Gerbers là gì? Chúng là một tập hợp các tệp mà hội đồng quản trị sử dụng để tạo ra PCB. Tệp CAM (sản xuất có sự hỗ trợ của máy tính) là một cách để cho chương trình thiết kế biết cách tạo ra các Gerber. Elecrow có một tệp CAM có sẵn cho Eagle, giúp tạo Gerbers thực sự dễ dàng. Về cơ bản, nó xác định những lớp nào nên được kết hợp trong mỗi tệp Gerber. Bộ xử lý CAM trông giống như sau:
Sau khi xử lý công việc, các tệp sau sẽ được tạo. Các tệp này được kết hợp thành một tệp zip và được tải lên hội đồng quản trị trong quá trình thanh toán.
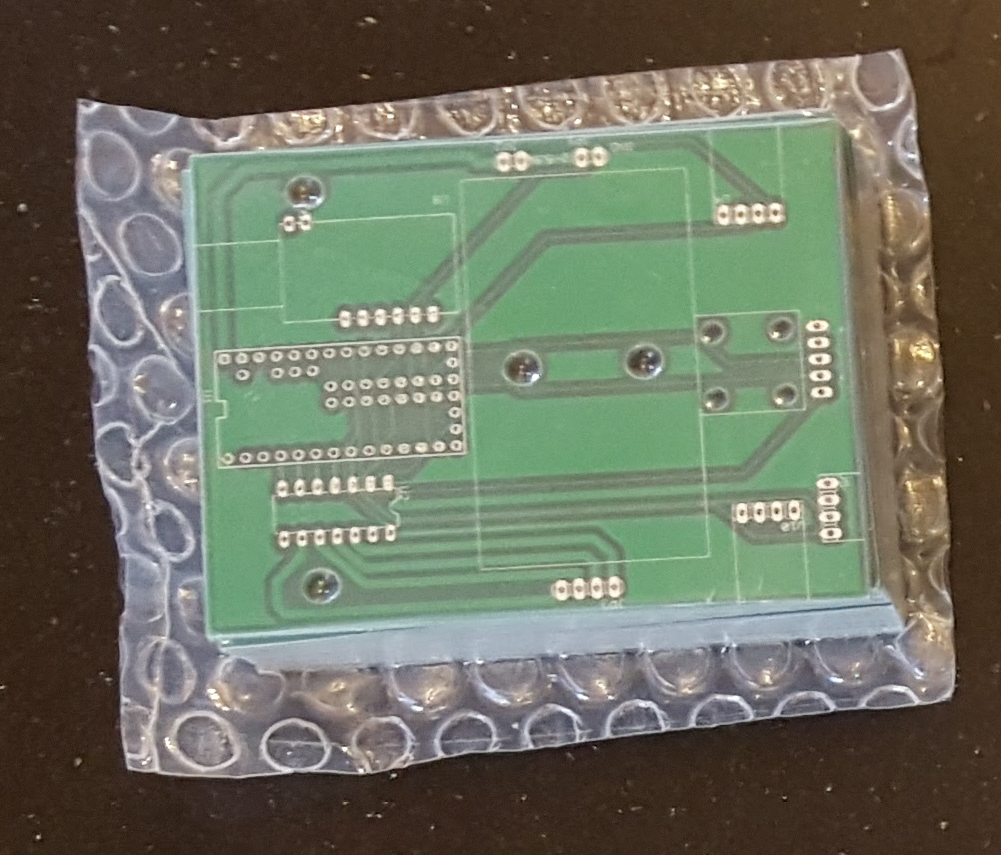
Tôi đã đặt hàng bảng từ Elecrow bằng phương thức vận chuyển DHL Thâm Quyến (2-3 ngày làm việc). Tôi đã đặt hàng vào ngày 18 tháng 10 và nhận được bảng vào ngày 23 tháng 10! Họ đây rồi:
Lưu ý : Các tấm ván trong hình có mẫu lỗ nhỏ hơn cho bánh xe đẩy bóng. Tôi đã thiết kế lại gói cho bài viết này để phù hợp với một bánh xe bóng lớn hơn.
Phần kết luận
Trong bài viết này, tôi đã trình bày quy trình lấy một giản đồ và tạo ra một PCB có thể được đặt hàng từ các nhà sản xuất trực tuyến. Ngày nay, các bo mạch rất rẻ đến mức trừ khi một dự án rất đơn giản, thì việc đặt mua PCB là rất hợp lý. Dự án của bạn sẽ gọn gàng hơn nhiều và mất ít thời gian hơn để nối dây với nhau! Trong bài viết tiếp theo, tôi sẽ đặt robot lại với nhau và xác minh các kết nối điện!
Tải xuống
Tải xuống tệp PCB, thư viện Gerbers và Eagle cho các thành phần bên dưới.
About Công nghệ TK











































Không có nhận xét nào