

Cách chế tạo Robot - Thiết kế và Sơ đồ
Phần một trong loạt bài viết về cách chế tạo robot có thể đi theo đường thẳng hoặc tường và tránh chướng ngại vật!

Bắt đầu xây dựng một robot có thể đi theo đường hoặc tường và tránh chướng ngại vật!
Những bài viết liên quan
Cách chế tạo Robot:
Phần 2: Thiết kế PCB
Phần 3: Kiểm tra phần cứng
Phần 4: Người theo dòng
Phần 5: Tránh chướng ngại vật
Phần 6: Robot theo dõi tường
Tổng quat
Đây là phần 1 của loạt bài viết về kinh nghiệm của tôi khi chế tạo một robot có thể làm nhiều việc khác nhau. Tôi nghĩ sẽ thật gọn gàng nếu tạo ra một con robot dễ dàng lắp ráp lại với nhau bằng một chiếc mỏ hàn duy nhất và giá cả cũng phải chăng. Tôi đã đưa ra các yêu cầu sau cho rô bốt của mình:
- Nhiều bộ dụng cụ đắt tiền, vì vậy nó phải tương đối rẻ.
- Nó phải dễ dàng ghép lại với nhau mà không cần thiết bị đặc biệt.
- Nó phải được lập trình dễ dàng mà không cần IDE hoặc lập trình viên phức tạp.
- Nó phải đủ mạnh để có thể mở rộng.
- Nó sẽ chạy khỏi một nguồn điện đơn giản.
- Nó phải có thể đi theo một đường hoặc một bức tường và tránh chướng ngại vật.
Trong bài viết này, tôi sẽ nói về cách tôi quyết định đáp ứng những yêu cầu này.
Chọn các thành phần
Bước đầu tiên trong bất kỳ dự án nào là tìm ra những phần cần thiết. Một robot cần một vài điều chính để trở nên hữu ích: cách di chuyển, suy nghĩ và tương tác với môi trường xung quanh. Để giảm chi phí, tôi cần đi bằng hai bánh xe. Điều này có nghĩa là để điều khiển tôi cần hai động cơ riêng biệt có thể hoạt động độc lập. Tôi cũng cần một bánh xe trượt bóng mà robot có thể dựa vào để lướt theo. Điều này có nhược điểm đáng tiếc là robot thực sự không thể đi trên bất kỳ bề mặt nào ngoài sàn nhẵn. Tôi muốn bộ não trở thành một nền tảng vi điều khiển nổi tiếng nào đó. Bằng cách này, nó sẽ 'cần một lập trình viên hoặc hướng dẫn để sử dụng các công cụ phát triển. Robot cần phải có các cảm biến cho phép nó nhận biết được đường, tường và chướng ngại vật. Tôi cũng muốn giảm thiểu số lượng những nơi khác nhau mà tôi mua đồ để giữ chi phí vận chuyển thấp. Cuối cùng,CAD đại bàng .
Cơ khí: Động cơ, Bánh răng, Bánh xe
Tôi đã tìm thấy một vài trang web cung cấp các động cơ và bộ phận rô bốt theo sở thích khác nhau, nhưng tôi quyết định chọn Pololu vì giá của chúng khá ổn và chúng có mọi thứ tôi cần. Các sản phẩm từ Tamiya trông khá tốt. Bộ hộp số đôi 70168 đi kèm với bánh răng, động cơ và trục, giúp đơn giản hóa cơ khí rất nhiều. Nó cũng rất rẻ! Các động cơ chạy trên 3V bình thường, nhưng có thể chạy cao hơn với cái giá là giảm tuổi thọ hoạt động. Một số tỷ số truyền được hỗ trợ, vì vậy tôi có thể tinh chỉnh tốc độ của rô bốt khi tôi có được nó. Tôi đã quyết định loại bánh xe rẻ nhất phù hợp với trục của bộ này, Bộ lốp xe tải Tamiya 70101. Bộ này đi kèm với bốn bánh xe và tôi chỉ cần hai bánh, nhưng nó rẻ và phụ tùng không bao giờ có hại! Bánh trước chỉ là bánh lăn bóng hoặc vít nhựa để robot có thể trượt dọc theo sàn nhà.
Bộ não: Vi điều khiển
Có một số nền tảng vi điều khiển khác nhau khá phổ biến. Sự lựa chọn rõ ràng là một số loại Arduino dựa trên phân cực. Các tùy chọn khác là Teensy , Launchpad và Raspberry Pi . Pi quá lớn và ngốn điện còn Launchpad thì quá lớn. Tôi đã sử dụng Teensy trong quá khứ và đã thành công tốt. Teensy đắt hơn một chút so với Arduino Mini nhưng cung cấp một nền tảng mạnh mẽ hơn nhiều. Teensy mới nhất có Cortex M4, rất mạnh mẽ cho một robot đơn giản. Một điểm cộng là Teensy có bộ điều chỉnh 500mA tích hợp có thể được sử dụng cho tất cả các cảm biến.
Tương tác: Cảm biến
Các cảm biến khác nhau là cần thiết cho các đường sau và tường sau. Các cảm biến sau dòng thường là các máy đo phản xạ thay đổi điện áp tùy thuộc vào lượng ánh sáng phản xạ từ mặt đất. Điều này được thực hiện bằng cách sử dụng đèn LED và điốt quang hoặc máy dò ánh sáng. Máy dò tường và chướng ngại vật thường là một loại cảm biến khoảng cách. Cả hai loại này đều có sẵn ở dạng đột phá DIP thuận tiện từ cùng một cửa hàng như động cơ cho phép tôi tiết kiệm chi phí vận chuyển và dễ dàng hàn! Đối với cảm biến dòng, tôi đã tìm thấy một cảm biến có 3 cảm biến cho phép dòng luôn được căn giữa vào robot. Đối với cảm biến khoảng cách, tôi quyết định chọn cảm biến IR có độ sáng cao , vì tôi đang hoạt động trên điện áp thấp hơn dự kiến.
Nguồn: Trình điều khiển động cơ, Pin
Trình điều khiển động cơ cần có khả năng lái các động cơ 3V ở trên. Tôi cũng muốn nó có thể mở rộng trong trường hợp tôi muốn nâng cấp động cơ trong tương lai. Tôi đã tìm thấy một cái từ cùng một cửa hàng như trên ở đây. Nó có thể hoạt động trên 0-11V và cung cấp nhiều dòng điện cho bất kỳ động cơ nào mà tôi muốn bổ sung trong tương lai. Đối với pin, tôi muốn robot chạy trên hầu hết mọi thứ. Đầu vào cho Teensy chấp nhận lên đến 5,5V, có nghĩa là có thể sử dụng pin lithium. Tuy nhiên, Lithium yêu cầu bộ sạc pin và tôi không muốn thêm số đó vào chi phí. Sử dụng hai pin AA thông thường cung cấp khá ít năng lượng mà không cần đến điều này. Nhược điểm là chúng chỉ cung cấp ~ 3V và lớn. Điện áp đầu vào 3V thấp hơn bộ điều chỉnh tuyến tính 3,3V của Teensy. Robot vẫn sẽ hoạt động, vì tất cả các thành phần được chọn cho Teensy có thể hoạt động ở điện áp thấp hơn. Tuy nhiên, bộ điều chỉnh tích hợp trên Teensy sẽ chạy không được kiểm soát.
Các mặt hàng tùy chọn
Tôi muốn một cách điều khiển bảng thông qua điện thoại thông minh của mình tại một số thời điểm, vì vậy tôi đã đưa thiết bị BLE vào sơ đồ. Điều này không cần thiết phải tuân theo các đường và các bức tường, nhưng tôi nghĩ nó sẽ là một bổ sung thú vị. Tôi cũng muốn có một cách để dễ dàng loại bỏ các mục, vì vậy tôi sẽ sử dụng các tiêu đề nữ để kết nối mọi thứ với bảng.
Toàn bộ hóa đơn vật liệu
Vật liệu cần thiết
| Loại bộ phận | Số bộ phận | Giá cả |
|---|---|---|
| Vi điều khiển | Thanh thiếu niên 3.2 | 19,80 |
| Động cơ | Tamiya 70168 | 9,25 |
| Trình điều khiển động cơ | DRV8835 | 4,49 |
| Ball Caster | Tamiya 70144 | 5,99 |
| Cảm biến phản xạ | QTR-3RC | 4,95 |
| Lốp xe | Tamiya 70101 | 4,10 |
| Cảm biến khoảng cách | Pololu 38kHz | 5,95 |
| PCB | Elecro 10x10cm | 14,00 |
| Trường hợp pin | Giá đỡ pin 2-AA | 0,79 |
| Tổng số tiền vận chuyển: | $ 49,52 |
Vật liệu tùy chọn
| Loại bộ phận | Số bộ phận | Giá cả |
|---|---|---|
| Không dây | nRF51 Dongle | 52,39 |
| Kết nối | Các tiêu đề 100mil nữ khác nhau | 5.00 |
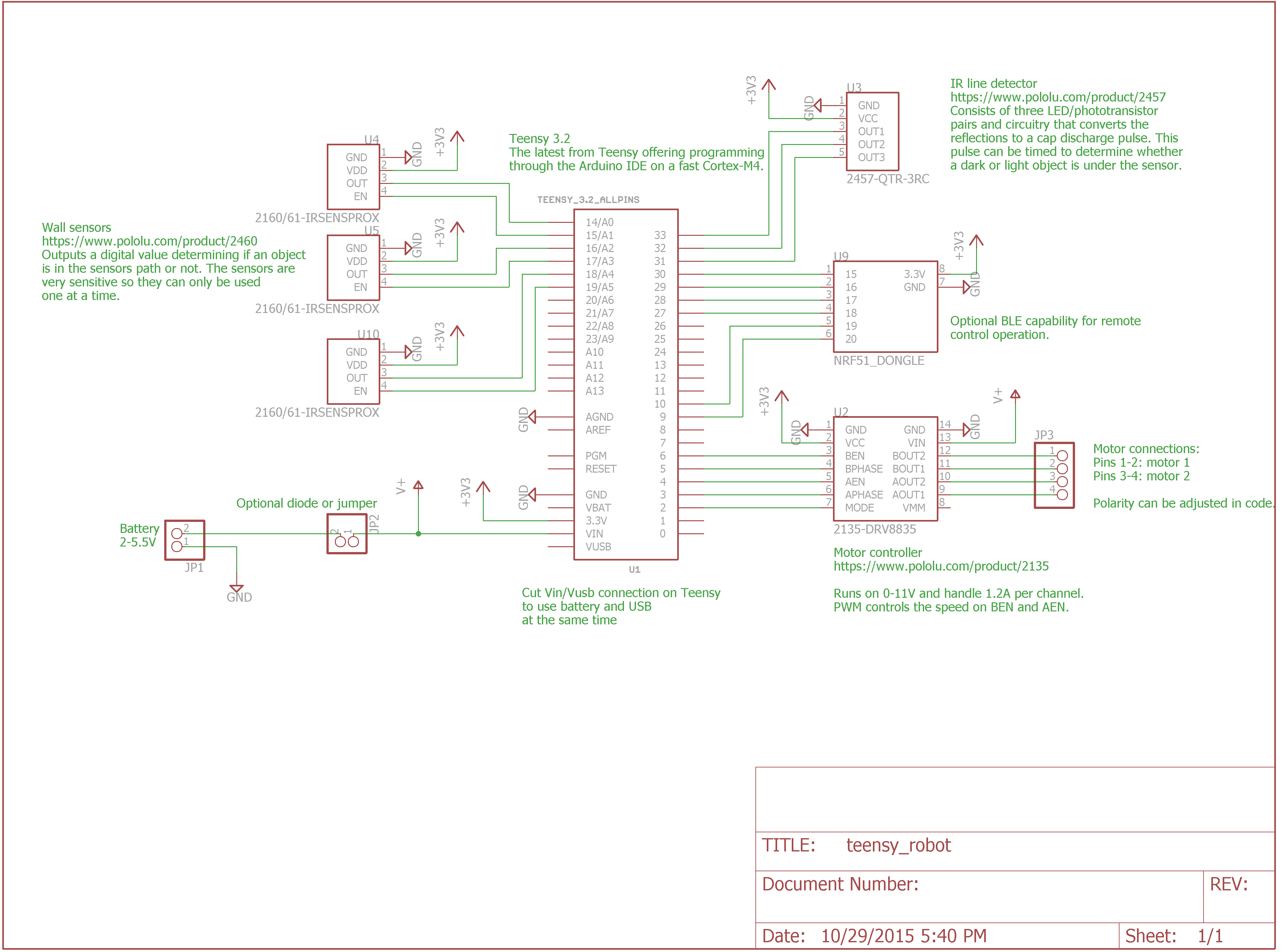
Sơ đồ
Tôi đang sử dụng phiên bản phần mềm miễn phí của Eagle CAD để vẽ sơ đồ và bố cục. Tôi đã tạo biểu tượng / dấu chân tùy chỉnh cho tất cả các mặt hàng ngoại trừ thiết bị Teensy, có sẵn để tải xuống trong Phần 2 của loạt bài này. Teensy có thư viện cho Eagle ở đây . Bạn có thể nhận thấy sơ đồ thiếu bất kỳ thiết bị đơn giản nào như điện trở hoặc tụ điện. Điều này là do mỗi một trong những bảng này là một bảng đột phá để giúp việc lắp ráp dễ dàng nhất có thể. Bất kỳ con chip nào gần đây sẽ có khả năng được gắn trên bề mặt, điều khó làm được đối với một người có sở thích. Các sơ đồ cho mỗi bảng này có sẵn từ những người bán tương ứng của họ. Dưới đây là một số điểm chính cho giản đồ này:
- Tôi đặt một jumper giữa pin và phần còn lại của mạch. Điều này rất hữu ích để ngắt nguồn điện mà không cần tháo bất kỳ pin nào, để đo dòng điện hoặc để bảo vệ mạch khỏi phân cực ngược bằng diode.
- Tất cả các giao diện là kỹ thuật số ngoại trừ hai. Có một kết nối UART giữa nRF51 và Teensy thông qua các chân 9/10. Bộ điều khiển động cơ yêu cầu PWM, thông qua chân 6 và 4 của Teensy.
- Không có đèn LED trên sơ đồ. Đèn LED trên Teensy có thể được sử dụng để gỡ lỗi hoặc chỉ báo.
- Không có nút. Tôi đã cân nhắc đặt một nút trên dòng đặt lại của Teensy nhưng không để giảm chi phí.
- Khi lập trình Teensy thông qua USB, bạn phải cắt dấu vết nhỏ kết nối Vin / Vusb hoặc đảm bảo rằng pin không được kết nối trong khi cắm USB.
Tệp sơ đồ
teensy_robot.zip
Phần kết luận
Trong bài viết này, tôi đã phác thảo các yêu cầu đối với robot và các lựa chọn thiết kế của tôi để đáp ứng các yêu cầu đó. Những lựa chọn này dẫn đến một sơ đồ và hóa đơn vật liệu (BOM) để cộng thêm chi phí cho dự án. Trong phần 2 của loạt bài này, tôi sẽ vẽ bảng mạch để nó có thể được sản xuất!
About Công nghệ TK











































Không có nhận xét nào